Star Wars Wind-Up Mouse Droid
For Advanced 3D Drafting course (taken Fall '25), designed Star Wars Mouse Droid in SolidWorks with functional wind-up mechanism.
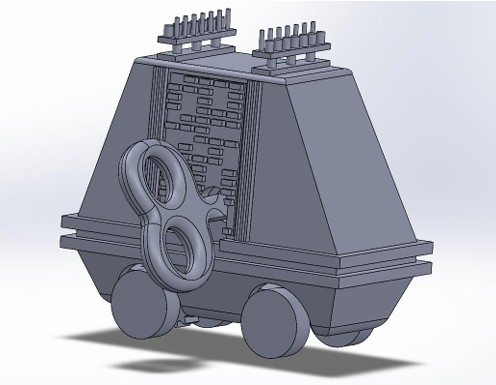
For this project, I decided to make the mouse droid from Star Wars. Going into the project, I wanted a real design challenge and planned from the start to make it suitable for 3D printing. The assignment requirement was to model and assemble any wheeled object in SolidWorks, and the default option many students selected was an existing Razor scooter. Instead, I created a fully custom assembly with a working internal drivetrain.
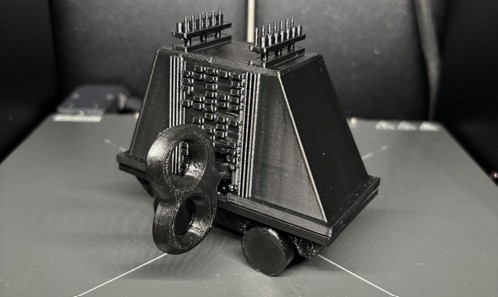
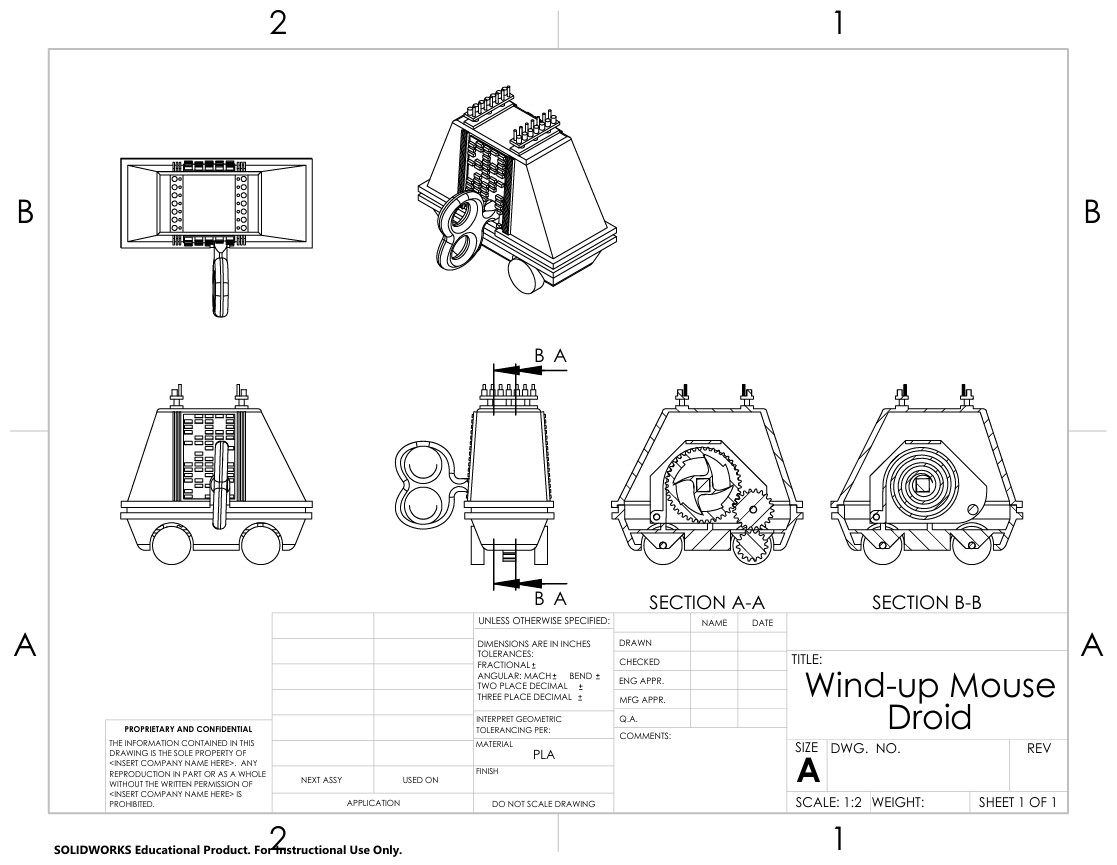
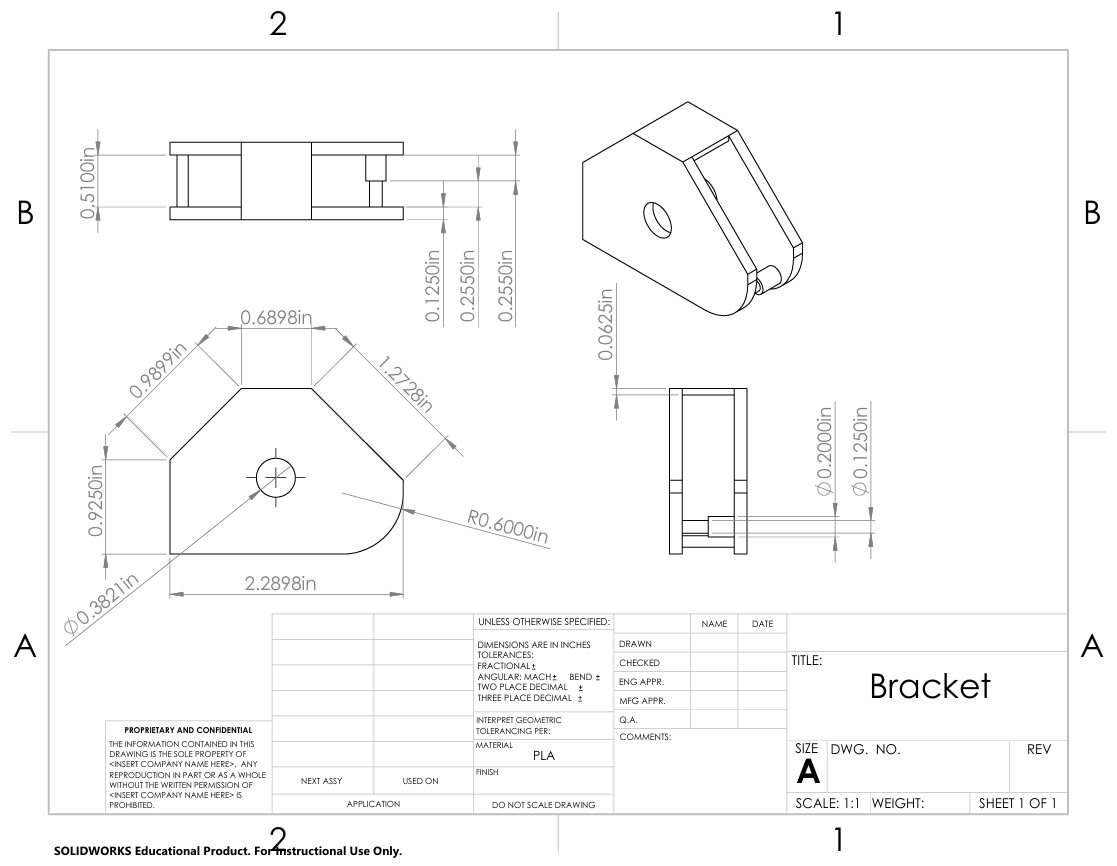
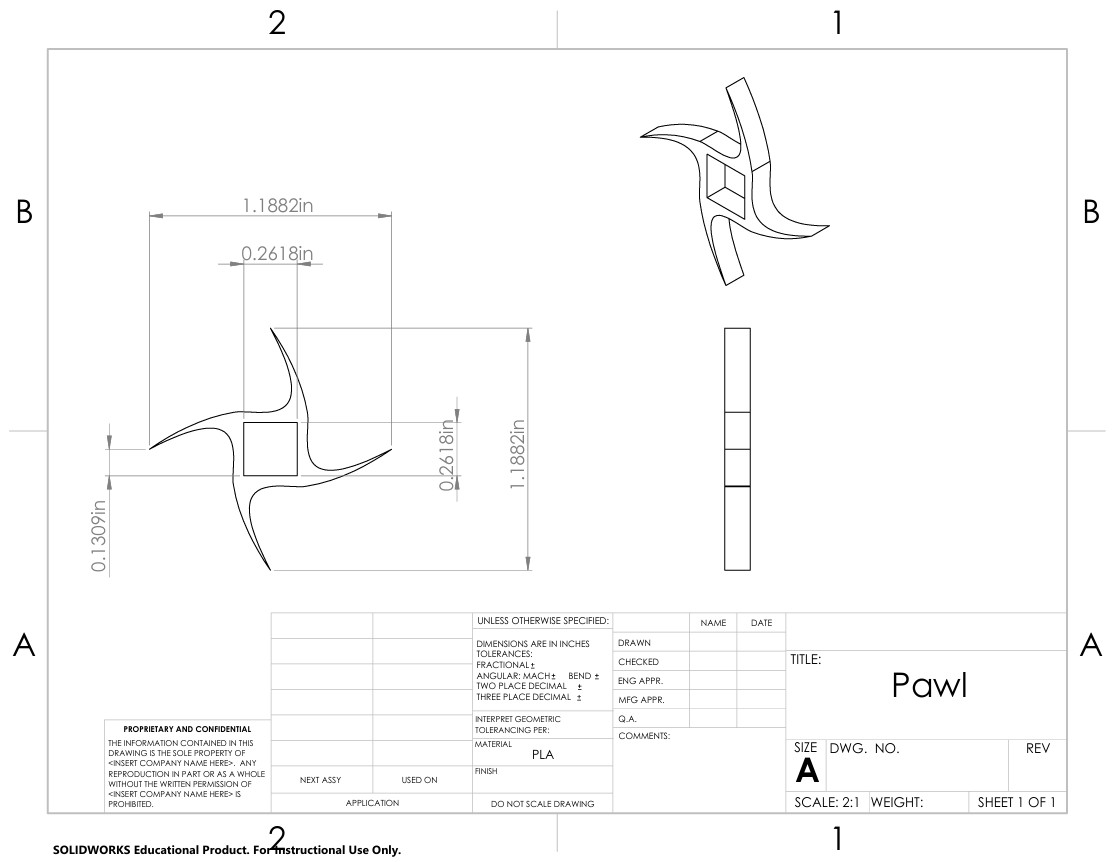
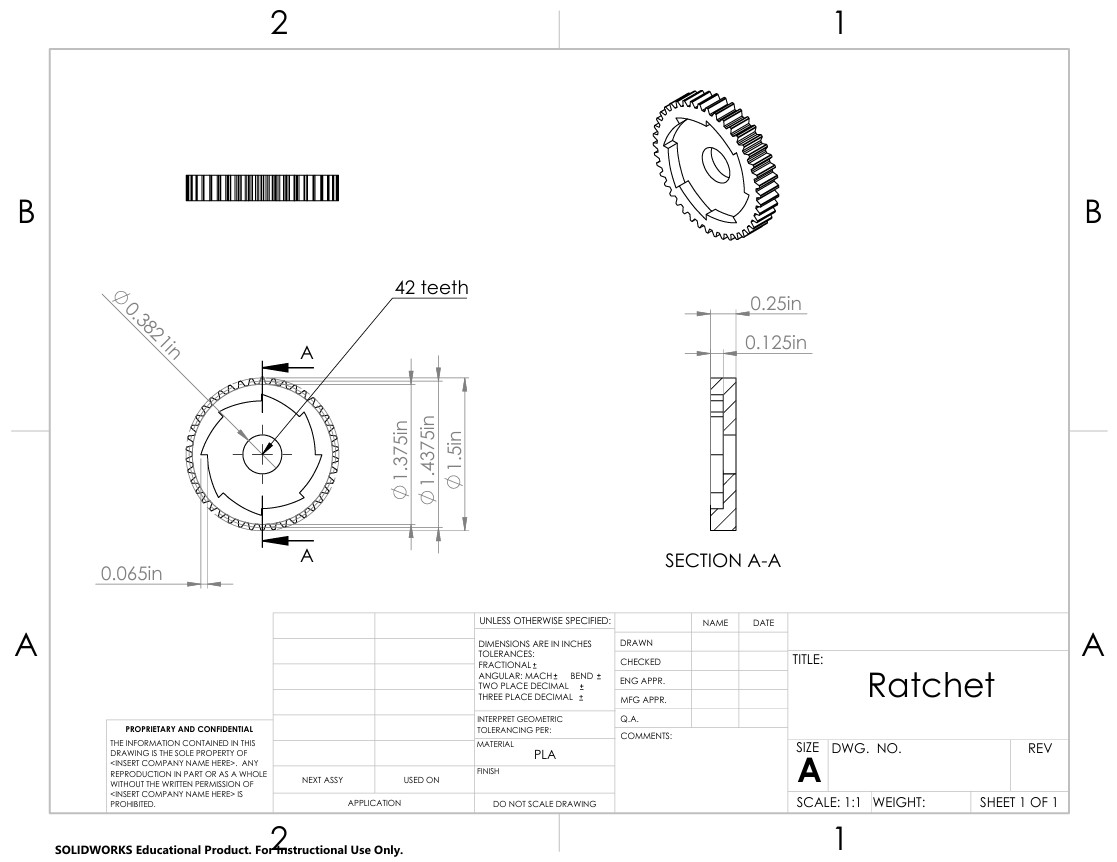
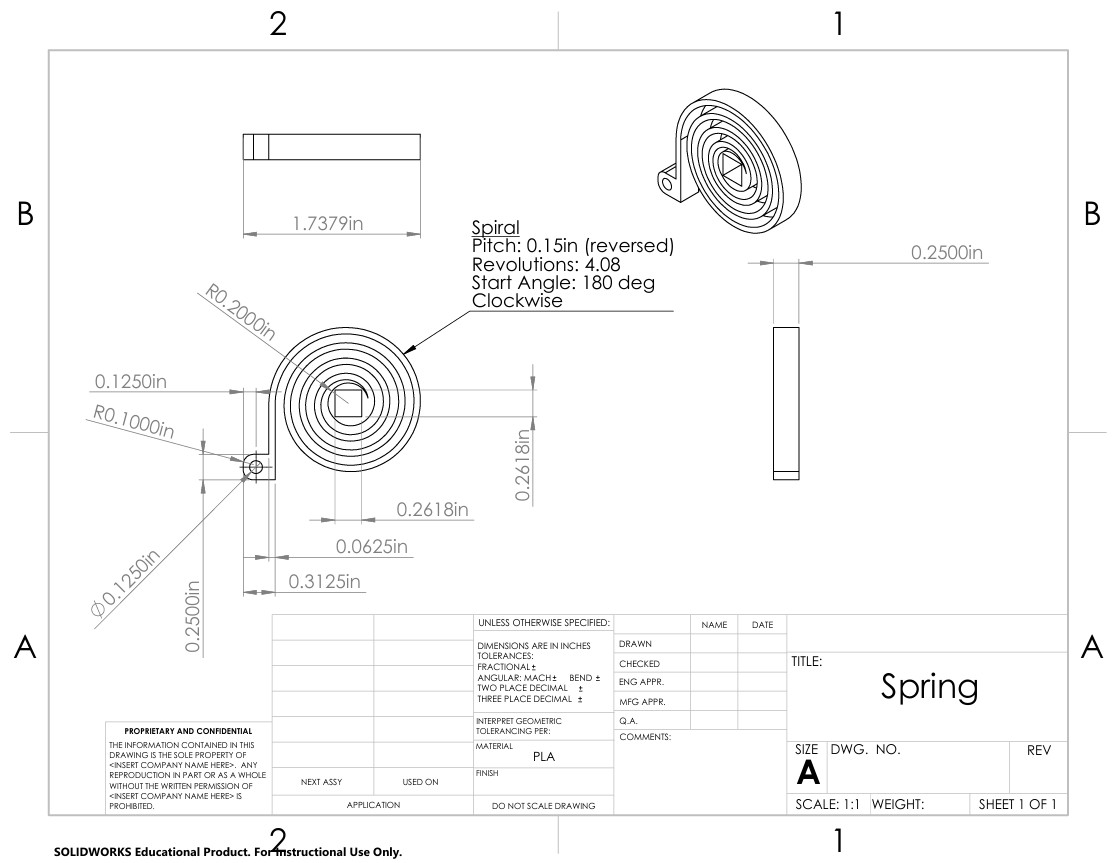
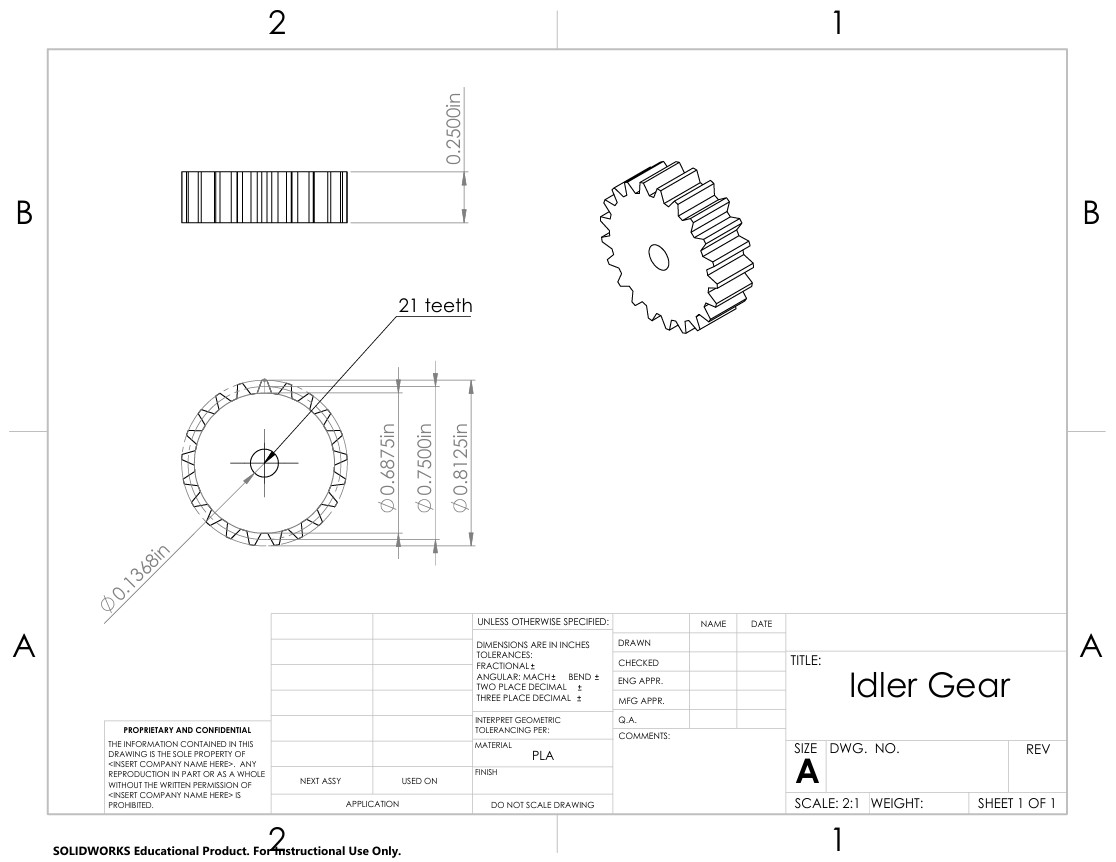
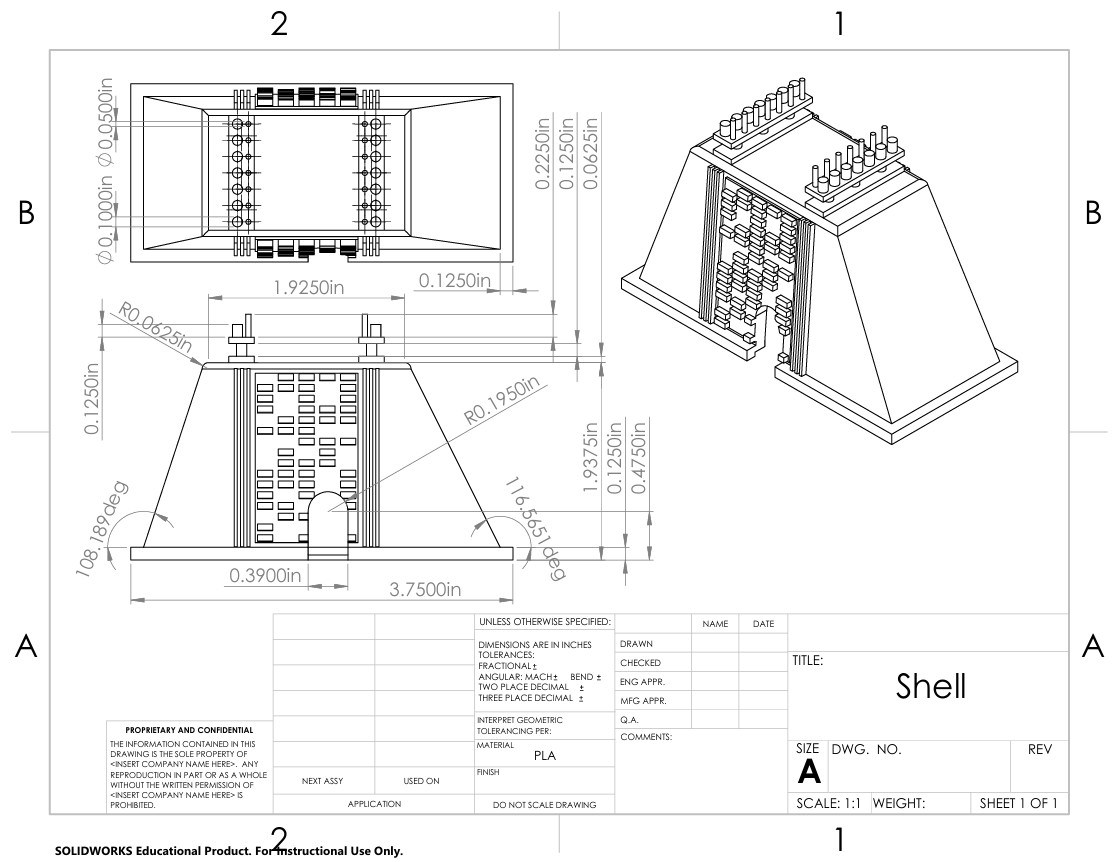
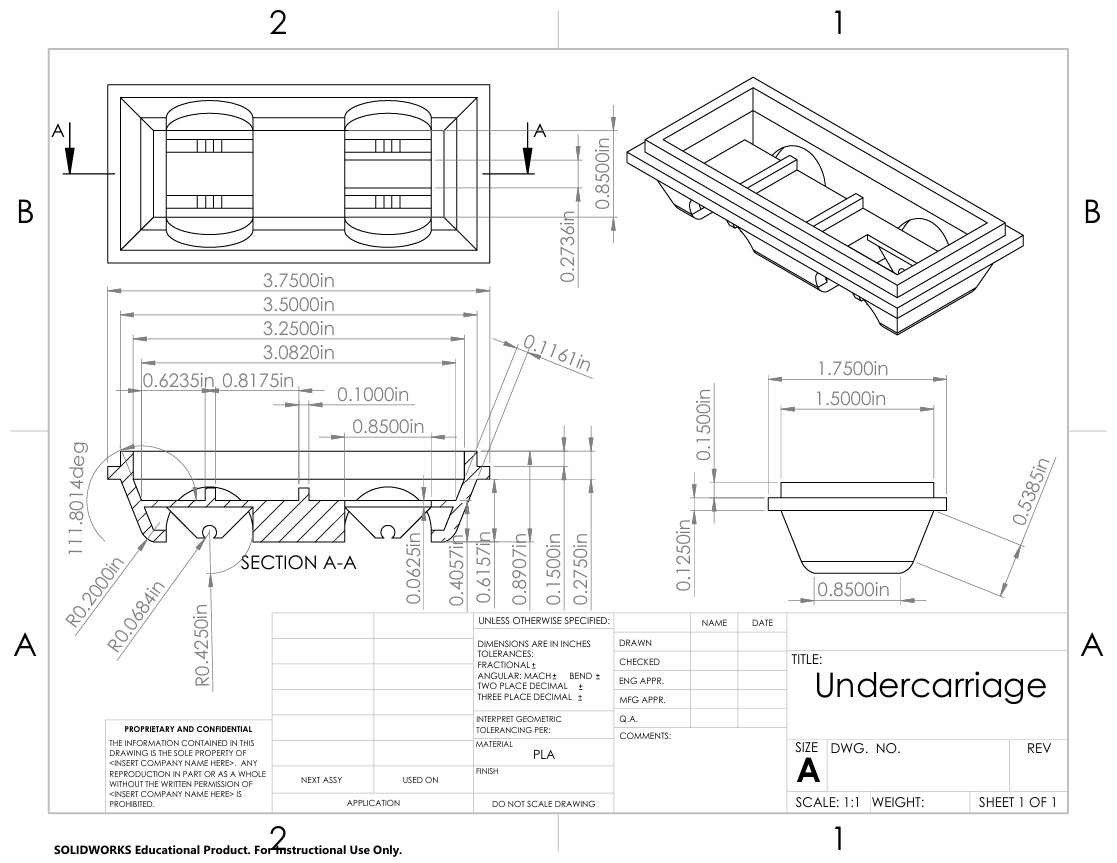
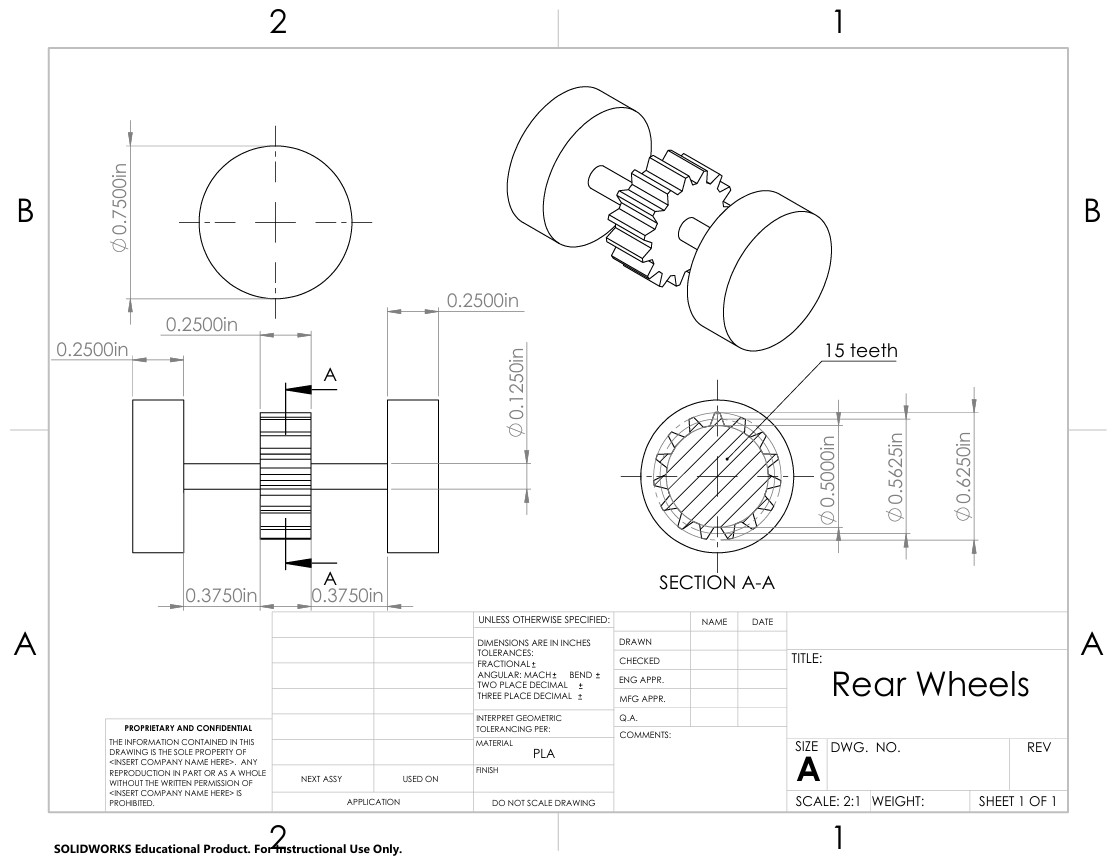
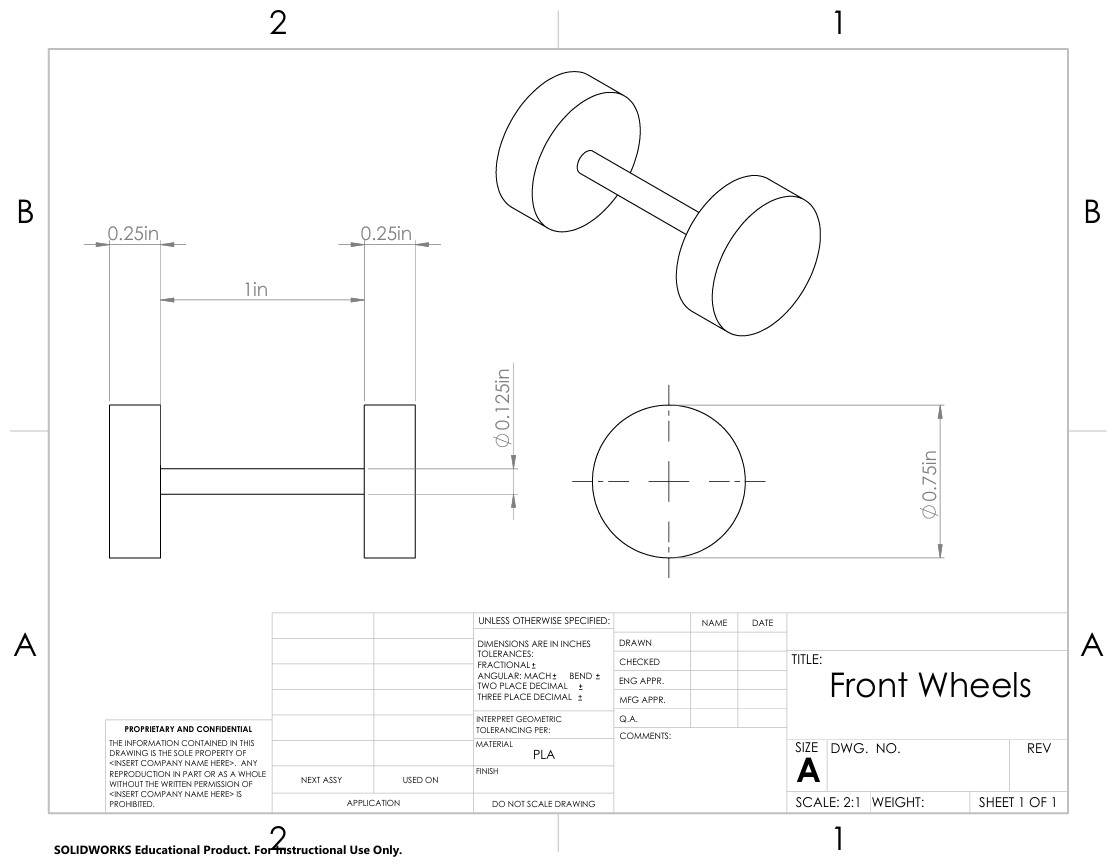
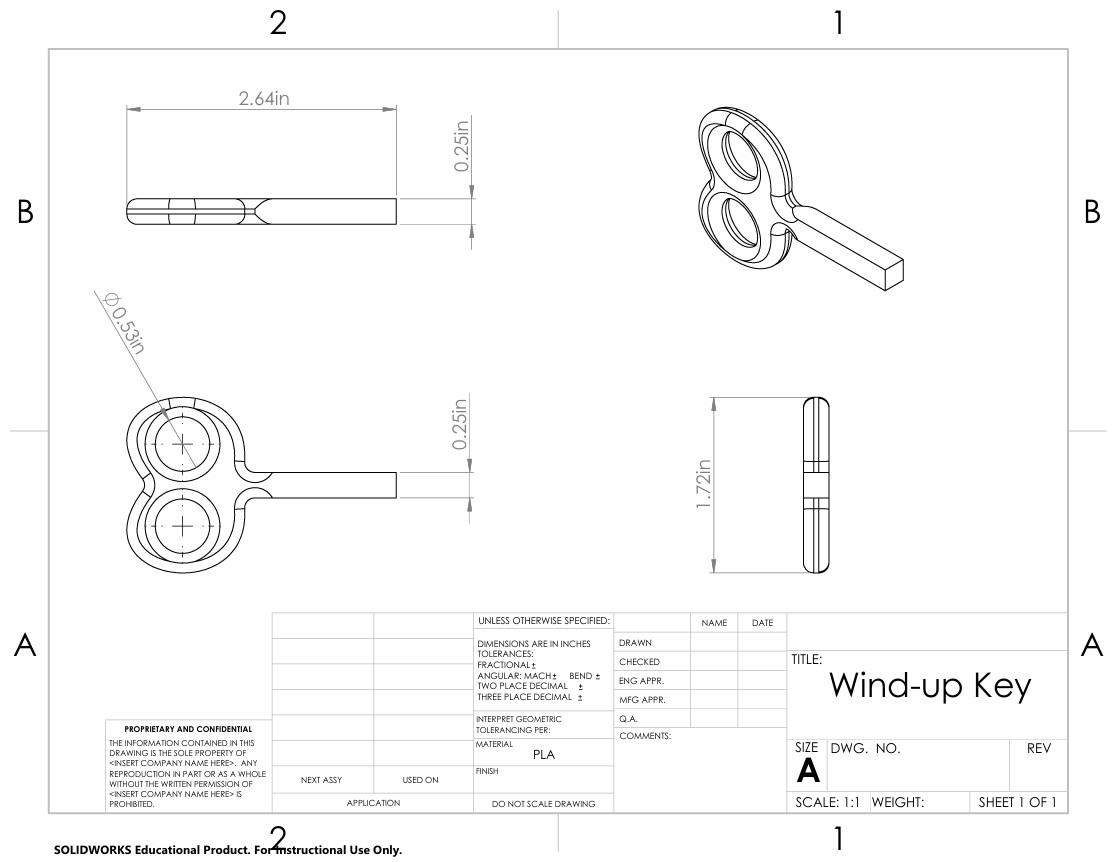
Since the exterior geometry of a mouse droid is admittedly simplistic, I chose to develop the internal systems as well. I designed a wind-up mechanism so the model would not only meet the wheeled-vehicle requirement, but actually move like one. To make that possible—in addition to the outer shell, wheels, and undercarriage—I built a compact wind-up gearbox inside the body. The mechanism includes a large central ratchet, spiral torsion spring, gear train, and cartoonish style winding key, allowing the model to run under stored spring energy.
Because the assignment required no use of the SolidWorks toolbox, all gears were created manually. I turned this limitation into an opportunity for a crash-course on gear design; I had to learn the relationships between tooth count, diameter, pitch, pressure angle, etc. so the gears would mesh correctly.
Although only a completed CAD assembly was required, I also iteratively 3D printed the parts in PETG to verify fit, and overall mechanism performance.